Công tắc giới hạn độ rung cuộn dây đầu nhựa

-

Vỏ chắc chắn
-

Hành động đáng tin cậy
-

Cuộc sống được nâng cao
Mô tả sản phẩm
Công tắc hành trình thu nhỏ dòng RL8 của Renew có độ bền cao và khả năng chống chịu tốt với môi trường khắc nghiệt, với tuổi thọ cơ học lên đến 10 triệu lần hoạt động. Điều này làm cho chúng trở nên lý tưởng cho các ứng dụng quan trọng và tải nặng, nơi các công tắc cơ bản tiêu chuẩn không đáp ứng được yêu cầu. Với cần lò xo linh hoạt, công tắc hành trình kiểu lắc cuộn dây có thể hoạt động theo nhiều hướng (ngoại trừ hướng trục), giúp bù trừ sự sai lệch. Nó hoàn toàn phù hợp để phát hiện các vật thể tiếp cận từ nhiều góc độ khác nhau. Có sẵn đầu bằng nhựa và đầu bằng dây cho các ứng dụng khác nhau.
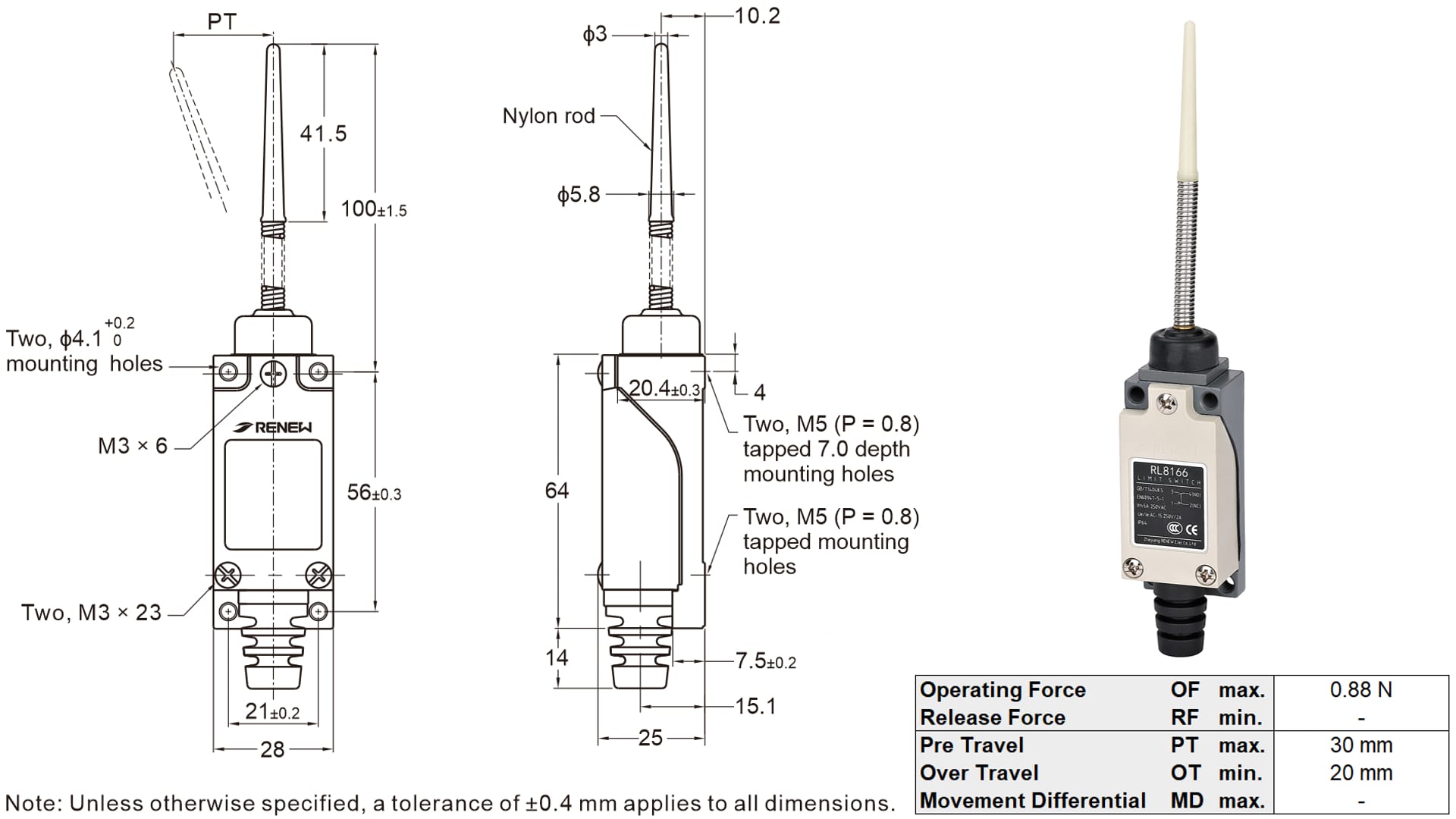
Kích thước và đặc tính hoạt động
Thông số kỹ thuật chung
| Định mức Ampe | 5 A, 250 VAC |
| Điện trở cách điện | Tối thiểu 100 MΩ (ở 500 VDC) |
| Điện trở tiếp xúc | Giá trị tối đa 25 mΩ (giá trị ban đầu) |
| Độ bền điện môi | Giữa các tiếp điểm cùng cực Điện áp 1000 VAC, tần số 50/60 Hz trong 1 phút. |
| Giữa các bộ phận kim loại dẫn điện và đất, và giữa mỗi đầu cực và các bộ phận kim loại không dẫn điện. 2000 VAC, 50/60 Hz trong 1 phút | |
| Khả năng chống rung cho sự cố | Tần số từ 10 đến 55 Hz, biên độ kép 1,5 mm (lỗi hệ thống: tối đa 1 ms). |
| Tuổi thọ cơ học | Tối thiểu 10.000.000 thao tác (120 thao tác/phút) |
| Tuổi thọ điện | Tối thiểu 300.000 lần hoạt động (dưới tải điện trở định mức) |
| Mức độ bảo vệ | Đa năng: IP64 |
Ứng dụng
Các công tắc giới hạn thu nhỏ của Renew đóng vai trò quan trọng trong việc đảm bảo an toàn, độ chính xác và độ tin cậy của nhiều thiết bị trong các lĩnh vực khác nhau. Dưới đây là một số ứng dụng phổ biến hoặc tiềm năng.

Hậu cần và quy trình kho hàng
Trong các nhà kho và nhà máy hiện đại, các công tắc giới hạn này có thể được sử dụng trong máy móc đóng gói để phát hiện các kiện hàng có hình dạng bất thường di chuyển trên băng chuyền. Thanh mềm sẽ uốn cong theo hình dạng của kiện hàng, kích hoạt công tắc. Chúng cũng có thể được sử dụng trong robot và các hệ thống tự động hóa để phát hiện vị trí cuối của cánh tay robot hoặc các bộ phận chuyển động có thể không khớp hoàn hảo mọi lúc.













